|
This report gives a detailed review of the key technologies needed in the operation of a fleet of cybercars arranged to form a transportation system which we will call CTS (Cybernetics Transportation System). Existing techniques are reviewed with their advantages and drawbacks, but also with their potential for improvement in the near future. The technologies have been divided into two groups, which we will find in the next workpackages which concern the improvement of these technologies : infrastructure Technologies
|
||||||||||||
| Vehicles Technologies |
Control Technologies
|
The cybercars, being autonomous vehicles entirely under the control of computer systems, need various actuators in order to move. In the past, these actuators were built for AGV's in the industry or for research vehicles, in small quantities for each new type of vehicle and at great cost. Now, thanks to the switch of the automotive companies (and mostly, their suppliers) to electronically actuated components (leading to "drive-by-wire"), these actuators are manufactured in large quantities at low cost and the cybercars will benefit from these industrial advanced products. The basic actuators for a vehicle are the power train formed by the motor, the gearbox, and transmission to the wheels, the brakes and the steering. All of these actuators, except for the brakes which are still at the research stage, are now available with electric motors and all the needed controls in large quantities and hence, low cost. One of the major control tasks of the low level actuators is to insure a safe and comfortable operation of the vehicles. In particular, accelerations and jerks in the lateral and longitudinal axes must not exceed certain limits well accepted in public transportation. In particular, if the passengers are standing, the jerk must not exceed the value of 0.7m/s3. This might pose a severe constraint on emergency braking and at least a good control of the deceleration curve. The actuators are operated by powerful microcontrollers, now available off the shelf and these microcontrollers come with computer tools to program them, often linked directly to analysis and simulation tools such as with the widely used in the industry, Mathlab-Simulink-D-Base tools. Instead of a single processor controlling the entire vehicle, it is now common, as it is in the automotive industry, to connect several microcontrollers together through a field network such as CAN or optical fibre Ethernet. This approach can simplify the design and the wiring but brings new problems of programming in a distributed environment and in particular problems of real-time operating systems. These problems are now extensively studied for aerospace applications as well as for automotive applications. A particular approach called AAA (Adequation Algorithm Architecture) tries to separate the programming task from the definition of the architecture and to generate automatically the various programs to be downloaded in the different microcontrollers together with the synchronisation primitives. Such a tool (called SynDEx) has been developed at INRIA and has been used successfully to develop complex control algorithms on cybercars. |
|
One key component to provide the autonomy of navigation to CyberCars is the ability to position accurately the vehicle in reference to the road network . The tentative targets for the longitudinal and lateral accuracy are respectively 10 cm and 5 cm. Considering CyberCars, the first parameter is the reliability of the technology, the second, to offer a flexible door to door application, is a low impact on infrastructure. |
|
Largely used in industrial applications for automated vehicles since the 1960's, the wire-guided technology is used for their golf cars by our partner, Yamaha. Three separate sensors in the front of the vehicle measure the induction from a wire in the ground, run by an alternating current (eg about 2,000Hz for Yamaha AGV vehicles). Then the vehicle knows, because of the differences in induction voltage, in which direction it should steer the vehicle. To obtain additional information concerning speed and stopping points , an induction sensor in the vehicles "reads" the codes given by sets of magnets which are placed under the road surface. |
|
The principle is to integrate on the planned trajectory small magnets in the ground (approximately every meter). When detected, those magnets recalibrate the navigation sensors (e.g. odometer) used to predict the relative position. This technology is cheaper on the infrastructure but more costly on the vehicle but it can work at high speed as it was shown in 1997 in the Automated Highway System demonstration in San Diego. Small adjustments in the trajectory are also possible just by software since the trajectories do not have to run exactly through each magnet (the vehicle must sense each magnet just to reposition itself). |
|
Transponder guidance |
This method applied to the People Mover of Frog Navigation Systems, use a similar principle as the magnets, but is more sophisticated. In this case, the road marker are intelligent and can supply not only their position (relative to the vehicle) but also their identity and possibly some network characteristics (cross road configuration, road type, etc..). |
|
Introduced since many years on industrial AGV's, the principle is to scan with a 360° laser beam all around the vehicle and to measure, usually by time of flight, the distance and the azimuth of several reflectors whose absolute co-ordinates are saved in the on board computer. Usually, real time measurement of at least three reflectors are required to maintain the position. |
||||||||||||||||
|
|
||||||||||||||||
|
| DGPS or RTK GPS The Global Positioning System is well known. The performance reached by standard devices (one carrier frequency, differential measurement) are around 5 meters at 95% in the three co-ordinates (x, y, z). Major improvement of the performance reliability are expected in 2008 from the European system Galileo. To fulfil CyberCars targets, especially lateral positioning, the Real Time Kinematics methods are mandatory. This consist on measuring not only the time of flight to each satellite, but also to analyse the phase of the carrier frequency (the wavelength is about 0.2 m for a 1.5 GHz carrier frequency). The precision can reach a few centimetres and is adequate for lateral control. |
|
Inertial Navigation consisting on maintaining a relative position by constant integration of ego motion sensors (odometer, accelerometer, gyrometer, ..) is highly dependent on the accuracy and global stability of the embedded sensor itself. In the figure beside, the x-y drift between the measured trajectory (full line) and the real trajectory (doted line), is very low at short term but will by principle constantly increase with the time, needing to often re-calibrate the relative position.
|
|
Obstacle avoidance is among all the technologies need for cybercars, the most critical because of the safety issues both for the occupants and for the other road users. It is also the one which is the least developed and the most critical for the overall performance of the transportation system. At the moment, two techniques are well developed and often used in conjunction : ultrasounds and lasers. One must also mention that often, regulations will require a mechanical sensor such as a sensitive bumper to stop the vehicle in case of contact with an obstacle. This requirement leads to very low speeds and large overhanging bumpers. Active research is under way to find a solution to this critical issue, based on vision systems or on radar system bust most often on a fusion between two or three sensors. |
|
Ultra sonic sensors are today largely spread in automotive industry for the short distance obstacle detection, most of the time to assist the driver for back manoeuvres. Based on a 40 kHz sound pressure wavelength, the sensor cover a range of 1 to 3 meters detecting objects in an horizontal beam width of maximum 100° and 60° vertical. They suffer of insufficient information on the objects angular position so that echo cancellation, mainly on the road surface, is impossible to filter.
|
|
This is the most widely used obstacle sensor of all the automated vehicles, in industry or in the few people mover cases. It is based on a scanning laser beam in the horizontal field which gives the coordinates (distance and angle) of all the "hits"in this plane with a resolution of better than one degree and a frequency in the order of 10-50 Hz for each scan. The range can be of around 50m.
|
|
Long range radars have been put in production several years ago for ACC applications by several manufacturers. They are basically of two types : mechanical scanning where a mechanical part moves the beam in the horizontal plane, or electronic scanning where an advanced antenna moves the beam through electronic circuitry. The mechanical systems are generally more expansive while the electronic ones require more technical know-how. The radar uses the Doppler signal for direct speed measurement. Its relative speed measurement is extremely precise (< 0.2 km/h). This is a very important advantage allowing developing comfortable longitudinal control algorithms that handle dynamic traffic. One of the advantages of the radar technology is that the radar can be hidden (and protected) behind a plastic bumper, the microwave being not affected by this material.
|
|
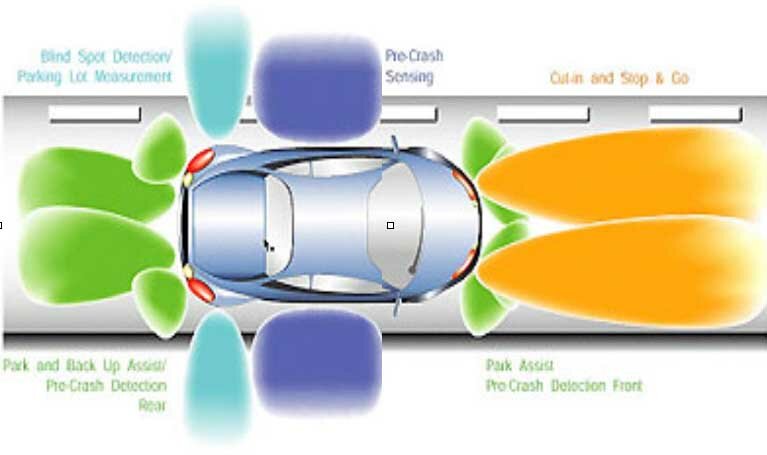
Short range radars are under development for several automotive applications. One of the concept under investigation is the use of the same sensorial platform for several Driver Assistance Functions, like the Parking Aid, Adaptive Cruise Control with Stop&Go, Blind spot Detection, and Autonomous Parking. This will allow to reduce the overall costs by sharing the basic sensorial equipment. The sensing unit more close to the market for this platform is based on the 24 Ghz radar technology. Some typical characteristics of this type of sensor are shown in the following table :
|
|
Platooning techniques are techniques which allow vehicles to follow each other at very close range. These techniques can be used for two purposes : - drive several vehicles, non mechanically coupled) with a single diver, The first need arises when we want to move empty vehicles from one location to the next or if we want to create variable length trains of vehicles with passengers. It is technically possible to do this using various techniques with lateral and longitudinal control of the vehicles with headways down to 0.3 sec and lateral ofset from one vehicle to the next of a few centimetres. It has been demonstrated that it could be feasible to drive trains of 2 to 5 vehicles in urban environments, even in the presence of other vehicles. The high throughput could be needed if cybercars are in large numbers and need at some places and at some point in time, to go through at high rate. Typical vehicle flows for passenger cars are on the order of 2,000 to 2,200 cars per hour per lane in the best cases. Using platooning technologies with headways of 0.5 seconds (which has been demonstrated), the maximum theoretical flow would be 7,200 vehicles per hour. Of course, this is only theoretical and one must allow for gaps for safety and merging or crossing of flows. However, it is considered as feasible to reach throughputs at least twice as large as with manual vehicles with a higher safety, and this on a much narrower lane (typically less than 2 meters instead of 3.5). The techniques for platooning rely on a precise measurement of distance and relative speed with the preceding vehicle and on a lateral control. The distance and speed measurement can be performed with radar, lidar or vision. In this last case, the state of the art relies on optical beacons (usually infrared lights) in the back of the preceding vehicle. For lateral control, the vehicle can be guided by the infrastructure or from the previous vehicle, in the case where the front vehicles is driven manually. Various platooning techniques have already been demonstrated technically, including with trucks (Chauffeur project - video.mpg).One such technique is in use for the platooning of busses at Toyota City in Japan |
| Infrastructure Technologies |
|
|
Cybercars by definition are under control of a management system in order to adapt the resources to the demand. Such systems have already been developed for car-sharing systems and for industrial AGVs. However, such systems will have to be adapted to the particular problems of public transportation with automated vehicles. In car sharing systems (CSS) individual users share a fleet of vehicles linked to transit. Planned to ease traffic congestions and to reduce air pollution, CSS programs are being developed in Europe (City Car Club [Mannan, 2001], Praxitèle [Blosseville, Massot and Mangeas 2000]) and in the USA (Intellishare [Barth and Todd, 2001], Carlink II [Shaeheen and Wright, 2001]). Among these, systems utilizing electric vehicles (EV) are especially suited for short-range trips and they provide the infrastructure needed for recharging car batteries. Some of their common characteristics include the application of intelligent transport systems (ITS) technologies to support Internet-based scheduling, geographic information systems (GIS), global positioning systems (GPS) and mobile communications for fleet management [Harrison, 1998], and smart PIN-based keys for the car's door lock and ignition. In every case, systems are managed by central control systems (CCS). Socio-economic appraisals demonstrate the operational cost effectiveness by means of increasing the amount of utilization while limiting the size of the fleet. Some experiments have tackled the difficult problem of redistribution of empty vehicles among the different parking lots but this has been limited by the need for human resources to perform the task.
For cybercars transportation systems (CTS), the fleet problems concern essentially the following elements : - vehicle allocation to a particular demand, All of these problems have already been addressed and should not bring any large difficulty except in the optimisation (or best compromise) of many design variables. |
|
|
Human-Machine Interfaces are still at their infancy for CTS. The only existing system (Parkshuttle) rely on a very simple call system similar in its principle to an elevator operation with push buttons at the stations and inside the vehicles. The Serpentine system now put in place has a similar operation with the added possibility to request a vehicle through a call to the management centre. However, when CTS will grow to a full network with potentially hundreds of stations, the HMI problems and definition will become much more complex. We will be faced with the following problems : - definition of procedures to call and possibly to reserve in advance a vehicle, We can already take advantage of the various systems which have been developed for car-sharing system and station car systems. Several of these systems have implemented and experimented with several of these points except those concerned with the autonomous functionalities |
|
Cybercars want to be environmentally friendly vehicles, well adapted to city driving. Besides, they need to be controlled by computer systems. For those two reasons at least, it is desirable that they are electrically powered. The problem is hence the storage and the transfer of energy to generate the electricity needed by the vehicles. The energy can be stored inside the vehicle under different forms, from electricity to hydrogen, passing through mechanical and fossil fuels. The cybercars will derive these energy technologies directly from the advances of electric vehicles on the market. Vehicle range is primarily determined by the capacity of the energy storage system used; hence the efforts by automakers to develop high-capacity batteries and the recent focus on research into hybrid vehicles and fuel cells. |
| Battery driven vehicles |
During the 20th century, a wide array of different types of batteries were tried and tested in the hope of finding the miracle combination: lightweight, powerful, high-capacity and inexpensive. Today, vehicle manufacturers have narrowed down their choices to: lead acid (Pb), nickel cadmium (NiCd), Nickel Metal Hydride (NiMH), sodium chloride batteries, nickel chloride batteries (NaCl, NaNiCl2), known as "Zebra", and two types of lithium batteries. Lead-acid remains the main choice for industrial applications, especially for forklifts and similar trucks. Approximately 95 percent of all mechanical drive systems use lead batteries. Lead also offers a cost-effective solution for heavy transportation (buses or refuse trucks, with change of battery pack, and even for tramways). These batteries are, by nature, relatively low capacity, but they provide a reasonable power density (500 W/kg) and are low cost. However, this type of battery does not meet the needs of electric cars, forcing automakers to turn to other solutions: the NiCd battery, which is used on the majority of French-made cars, and the NiMH battery, which is widely used in the United States. Some vehicles are powered by "hot" (Zebra) batteries, but this technology is still in the early stages of industrial development. The future of electric cars hinges on the industrial development of lithium batteries, which have an energy density approximately 3.5 times greater than lead batteries. Lithium batteries are currently being produced on pilot lines.
|
| Other energy storage technologies for electric transportation |
The main advantage of flywheel or supercapacitor-based energy storage is their ability to ensure a virtually unlimited number of cycles. They are ideal for greenfield site transportation systems and for hybrid vehicles using an independent energy source (thermal engine, fuel cells) or powered by overhead cables. It is noteworthy that flywheel energy storage systems have already proven effective on buses. The advent of composite materials (notably carbon fiber) has spurred further advances in this technology, making it possible to achieve peripheral speeds of 600 m/s (instead of 200 m/s, which is standard for steel flywheels). Supercapacitor technology is also evolving rapidly: the most recent products deliver a power density of 5 to 10 W/kg. |
|
The specificity of cybercars lies in the fact that the vehicles are designed for city use, at low speed and they remain in a limited environment. This means in particular that their energy needs are much less critical than for general purpose vehicles. In fact, for the small cybercars, energy needs of only a few kilowatt-hours (sometimes less than one) per one hundred kilometers are needed instead of 20 to 50 on regular cars at highway speed. Besides, these vehicles will never go very far for each trip and hence, they can go on a recharge station for automatic "refueling" as the need arises. For all these reasons, battery power is the standard among current and near term cybercars. Automatic recharging stations can be of two types : through conductive technology or through inductive technology. Conductive technology has been used for a very long time in industrial AGVs where it works well through electric rails or overhead lines. Similar technologies have also been developed for trams and trolleys with some innovative rail designs in the past few years, such as underground rail (Ansaldo) or segmented rails, where only 2 segments under the vehicles are switched on. Inductive technologies where developed for electric vehicles with manual system such as the Hughes system or automatic recharging stations such as for Praxitele or Tulip in France and ICVS in Japan. However, both of these systems had drawbacks in terms of mechanical alignment (Praxitele, ICVS) or efficiency and electromagnetic compatibility (Tulip). |
|
The inductive technology developed in Switzerland (Serpentine validated by EPFL) seems to overcome these drawbacks by an innovative design of the coupling. Besides, this technology allows the energy to be transferred along any point of a stretch and even while the vehicle is moving. The efficiency of the transfer is said to reach 97%. ENERGY USE AND SUSTAINABILITY OF TRANSPORT SYSTEMS |
|
By definition, cybercars are under the control of a management system. One of the roles of this management system is to be able to take control of the vehicle at any point in time, and in particular in case of incident. This means that an operator must know the status of any vehicle and be able to "drive" it from a remote location. Such remote control technologies for vehicles are well known in specific applications such as hazardous environments and military applications. To be applied efficiently in an urban environment, the problems concern the safety of such systems and the communication requirements. |